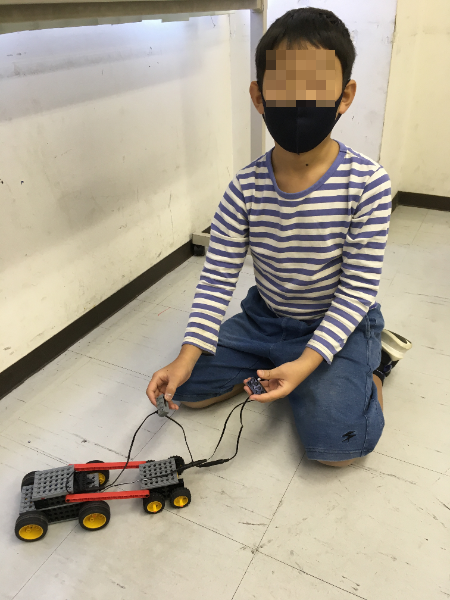
動く車に、牽引車を追加して、2連結ロボットを作ってくれました。連結にロッドの部品を使ったり、後方にも歯車を入れたりと工夫してくれいます。授業で勉強したタッチセンサーグレーと黒を連結させて、動き方を観察してくれていました。それぞれの押したときのスイッチ動作を観察して、押し方で、動きがどうなるかを見て、自分なりにスイッチ動作原理を確認していました。今後、センサーを使ったロボット組立時に、今回の観察が役に立つものと思います。
動く車に、牽引車を追加して、2連結ロボットを作ってくれました。連結にロッドの部品を使ったり、後方にも歯車を入れたりと工夫してくれいます。授業で勉強したタッチセンサーグレーと黒を連結させて、動き方を観察してくれていました。それぞれの押したときのスイッチ動作を観察して、押し方で、動きがどうなるかを見て、自分なりにスイッチ動作原理を確認していました。今後、センサーを使ったロボット組立時に、今回の観察が役に立つものと思います。