こんにちは。先生が作った「アメンロボ」の画像を掲載します。裏面から、撮影しましたので、自分の作ったものと比較してみてくださいね。

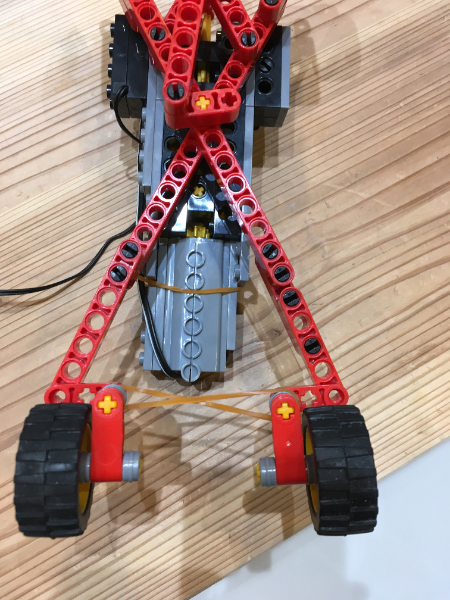

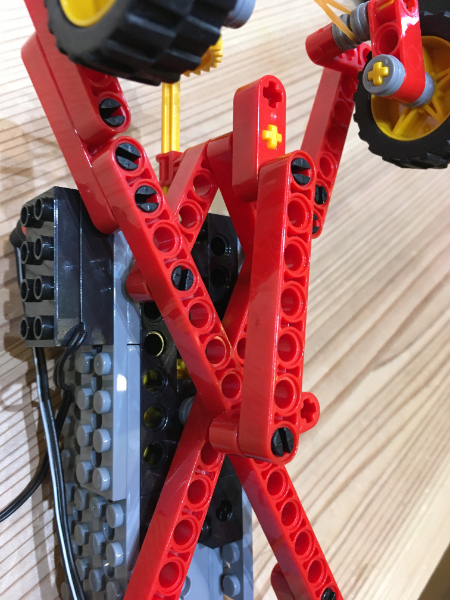
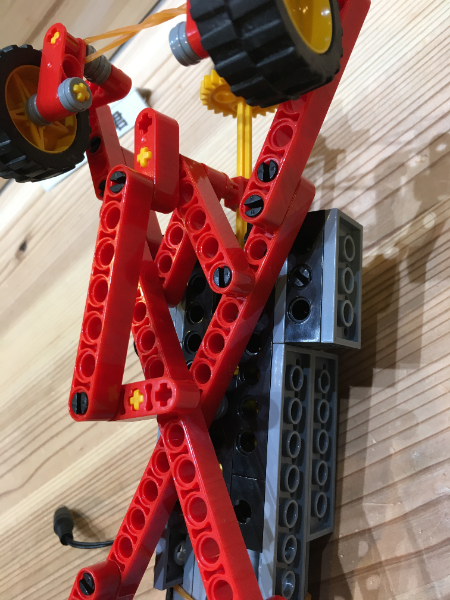
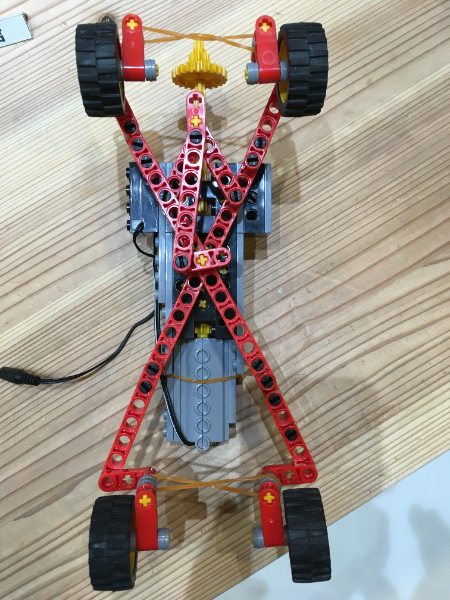
こんにちは。先生が作った「アメンロボ」の画像を掲載します。裏面から、撮影しましたので、自分の作ったものと比較してみてくださいね。
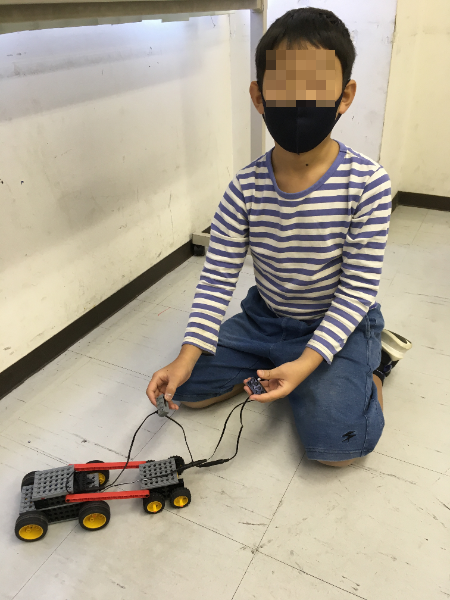
動く車に、牽引車を追加して、2連結ロボットを作ってくれました。連結にロッドの部品を使ったり、後方にも歯車を入れたりと工夫してくれいます。授業で勉強したタッチセンサーグレーと黒を連結させて、動き方を観察してくれていました。それぞれの押したときのスイッチ動作を観察して、押し方で、動きがどうなるかを見て、自分なりにスイッチ動作原理を確認していました。今後、センサーを使ったロボット組立時に、今回の観察が役に立つものと思います。
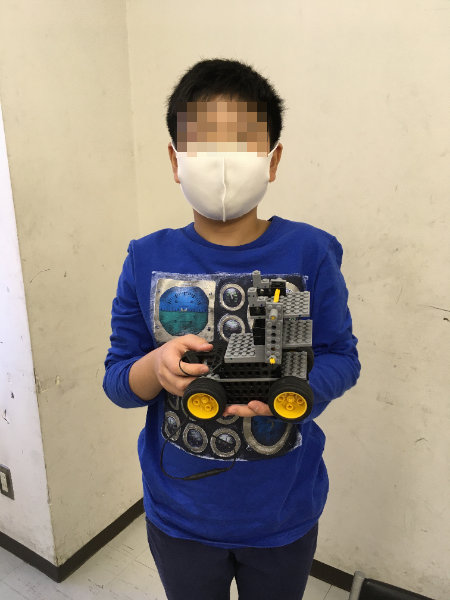
基本制作が完了した途端、頭の中でイメージした形をもとに、黙々と部品を取り出して組み上げてくれました。出来上がったのは、犬の顔で、ドックロボットに変身!形を作り上げていくとき、迷わず部品選択、配置をしていたので、組み立て開始前から、部品構成のイメージ(3次元的なプログラミング)が出来ていいたのでしょう。次回改造もたのしみです。
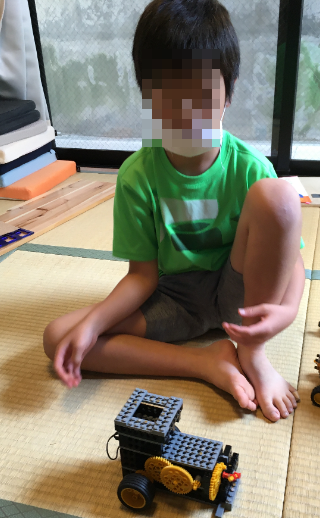
福島野田教室でのプライマリーコースのスタートアップ講座の2回目、動くロボットの改造例です。動く掃除機ロボットをイメージして、作りあげてくれました。初めての改造なのですが、ロッド、シャフトなどをうまく使い、床を掃除しているような動きとなりました。自分のイメージを、3次元的に形にしていく力は、すごいです。

こんにちは。じょうききかんしゃロボット「SLロボロコ2」改造例です。ピストン機構をさらに見える化した改造です。前の部分にアームを伸ばして、その部分が、ピストンと同期して動きます。アームの接続部に適切な部品を使って、うまくアームが固定されるように工夫されています。とっても面白い動きをするSLとなりました。

こんにちは。じょうききかんしゃロボット「SLロボロコ2」の改造例です。実際のSLに近づけようと煙突を付けたり、ラッセル車に改造してくれました。このラッセル機構では、機構自体にゆとりがなく、動きが悪るかったのですが、どうしたらいいかな、と問いかけると、色々工夫して、スムーズに動くようになりました。あとで言葉にすることによって、論理的に考えることができたのではなでしょうか。

こんにちは。 じょうききかんしゃロボット「SLロボロコ2」の改造例です。運転席と、燃料を運ぶ貨物車を追加、改造してくれました。いろんなところに、人を乗せて、動く機関車です。頑丈そうな運転席が印象的でした。次から次へと色んな改造に取り組んでくれていました。


こんにちは。 ならべてたおせ「ロボドミーノ2」の改造例です。本体の上に、ドミノなどを収納できるボックスを追加してくれています。色々考えて、いろんなものが乗るように、改造してくれています。夢中で、改造してくれている姿が、とても印象的でした。 次回の改造例が楽しみです。
こにちちは。10月から、大阪福島に、福島野田教室を開校します。場所は、 大阪梅田から、2駅、5分 のところにある、大阪市立福島区民センター内です。ロボット製作、プログラミングを通じて、わくわくドキドキするインスピレーションが、わき起こる体験を提供し、小さな発見から奇跡的な感動を生み出す作業のお手伝いをさせていただきたいと考えています。
こんにちは。
9月プライマリーのメガビートルの改造例です。メガビートルを動く高層住宅に変身!最上階には、この動くマンションを操縦する人が住んでいる?ようです。楽しい住まいですね。
