8月プライマリー「ロボフィッシュ」の海の中の生物を造った作品です。本体のロボットを完成後、テキストに載っている海の生物作りにトライしています。下の写真のテキストの下部に載っているカニをそのままに正確に再現しています。裏側が見えないので、どのように部品同志を接続しているかわかりませんが、その部分を頭の中で、3次元化して、部品を選んで組み上げています。部品の接続方法も熟知したうえで、適切な部品を選らんで、組み上げています。空間認識力、理解力がないとできない作品です!(ヒトデも作ってくれました。)



8月プライマリー「ロボフィッシュ」の海の中の生物を造った作品です。本体のロボットを完成後、テキストに載っている海の生物作りにトライしています。下の写真のテキストの下部に載っているカニをそのままに正確に再現しています。裏側が見えないので、どのように部品同志を接続しているかわかりませんが、その部分を頭の中で、3次元化して、部品を選んで組み上げています。部品の接続方法も熟知したうえで、適切な部品を選らんで、組み上げています。空間認識力、理解力がないとできない作品です!(ヒトデも作ってくれました。)
8月ベーシックコース「クルリン」改造例です。地面をでんぐり返りをするロボットですが、腕にシャフトを通すと、前回り、後回りするロボットに変身します。今回の改造は、その動きを、本物の鉄棒でやっているように、鉄棒の台を、ビーム、プレート、Tロッドなどをうまく組み合わせて創り上げています。安定して、回転させるのは、大変でしたが、なんとか完成しました!




ベーシックコース「ロボクリーン」改造例です。今回のロボットの形状から、蜘蛛にしようと考えて、改造してくれています。蜘蛛は、8本足だよね、ということで、ビーム、細プレートをうまく組み合わせて8本の足を作り、前には、目と触覚を付け加えています。さらに、ひもを使い、実際に蜘蛛が糸を出して、歩いているようにしています。最後に、大型蜘蛛ロボットのイメージで、操縦席を作り、パイロットを搭乗させています。とてもきれいな形に出来上がった作品だと思っています。



ベーシックコース「ロボクリーン」改造例です。クリーナーのロール部分は、ノーマルは、ロッド3アナ等を使用しているのですが、それだと大きいゴミしか吸い取れないので、その部分にタイヤSを追加して、さらにタイヤに輪ゴムを巻いて、小さなごみを回収できるようにしています。よく考えたアイデアだと思います。そして、実際にごみ収集にトライです!見事に小さなごみも採れて、ごみ収納スペースは、満杯になりました。さらにちいさなごみも採れるかを確認するため、ごみをちぎって小さくして、実験をしていました。(最終形になるまでに、ロッドを使って、傾斜を作り、ごみが採れないかもトライして、うまく取れないことがわかり、タイヤにもどしています。色々試行錯誤し、評価、実験したプロセスを踏んでの作品です。)



ベーシックコース「ロボクリーン」改造例です。クリーナーのロール部分は、ノーマルは、ロッド3アナ等を使用しているのですが、それだと大きいゴミしか吸い取れないので、その部分をタイヤSとギアMうすを使用して、小さなゴミも採れるようにしてくれています。また、ごみを広く集めるために、前部分にロッドなどを使って、ゲートを造ってくれました。そして、運転手を乗せて、屋根も付け加えています。さて、どれだけのごみが採れたかですが、見事ごみ収集部分が満杯になるくらいでした!




なわとびロボット「ジャンピングトビー」改造例です。2つの改造をしています。1つ目は、1回目の動作確認でも発生していたのですが、本体がジャンプするたびに、すこしづつ回転してしまう点です。タイヤを増やしたり、色々試行錯誤した結果、写真のような構造になりました。ポイントは、左右にシーソできないような固定方法では、ジャンプできなくなることに気づき、タイヤSとビーム、プレート、おもりのタイヤLを使って、回転防止もでき、ジャンプもできる構造を作りだしました。その後、なわを4重にして、4重跳びにチャレンジしてくれました。Tジョイントを上手く使い、どのシャフトも回転時に、本体にあたらないように長さを微調整しています。その結果、見事4重跳びに成功!しました。なぜそうなるか、それをどうすれば改善できるかを、考え抜いた作品となっています。

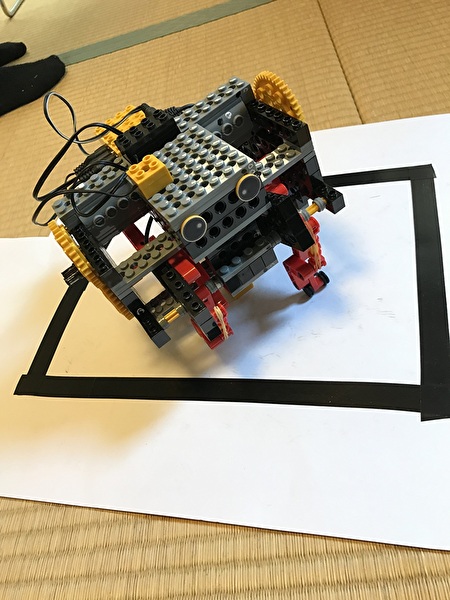
今月、京阪七条教室に通っていただいていた生徒さんが、最上位のアドバンスコース12体を全て作製され、修了されました! アドバンスコースの最初の頃は、平面図からロボットを組み立てるのに苦戦されることもありましたが、培ってきた空間認識力と、持ち前の理解力で、全てのロボットを自力で完成されました。最後のロボットが、とても多くの関節をもつ足で動く「モゾット」というロボットでしたが、見事黒枠からはみ出ない機構に創り上げました。これで、ロボット教室での授業は、終わりとなりますが、ぜひこの体験、経験を活かして、将来への道を切り開いていってもらえたらと思います。

アドバンスコース「カメラロボ」3回目です。アドバンスコースのロボット中で、唯一、毎回動きが変わり、作り替えが必要なロボットが、このカメラロボです。そのため、毎回時間内に完成させるのは、至難の業です! しかし、3回目まで毎回ロボットを完成してくれました。3回目は、中央の台の周りを回りながら、周囲の写真をある一定間隔で、自動で撮影するロボットです。見事に、プログラム通り、動作をさせて、完成です! 次回は、動きながら撮影するロボットへの改造ですので、完成して、動くのをみるのが楽しみです。

プライマリー「ロボゴング」改造例です。2回目のテキストでの改造を行って、1mを何秒で走りれるかのタイムトライアルをしてもらいました。まずノーマルでの測定、その後、後ろ足をタイヤSに換える改造をして、タイムを測定してくれました。その後、時間があったので、「先生、車に改造してもいい?」と聞かれたので、「いいよ」と答えました。今のロボゴングの回転部分をタイヤに換えて、車にするのかなと思っていましたが、様子を見ていると、モーター取り付け部、ギア部も、一から作っていました。完成した作品を見たら、自分の考えていた車のデザインがあったようで、そのように改造したかったと感じました。その後、「早く走らせる方法は、ない?」と聞かれたので、ギアMを、ピニオンギアに換えれば、早くなるよ、と伝えると、その改造に取り組んでくれました! ただ、時間切れで、最後まで完成できませんでした。家で、トライすると言われていたので、次回、結果を聞いてみたいと思います。

プライマリー「ロボゴング」改造例です。1mを何秒で走りれるかのタイムトライアルをしてもらいました 。自分で、タイマーを操作して、計測し、それを記録用紙に記入してもらっています。テキストの改造例で、タイムトライアル後、自分独自の改造をしています。前にタイヤSを付けたり、後足をタイヤLに換えたりしながら、何度もタイムを計ってくれました。そして、最後には、19秒!というベストタイムを出してくれました。試行錯誤しながら、頭の中で、どうすれば早くなるのか? を考えて、一生懸命取り組んでくれていました。次回は、アルペンくんなので、またタイムトライアルをしてもらいたいと思っています。


