でんぐり返りロボット「クルリン」改造例です。クルリンの原型を留めないほどに改造してくれています。改造前に、頭の中で、形をイメージして、その後、部品を選んで、改造にトライ!平面とは違い、3次元でのイメージを作り、形に仕上げています。優れた空間認識力、発想力を、いつも発揮してくれています。次回の改造も、楽しみです。
でんぐり返りロボット「クルリン」改造例です。クルリンの原型を留めないほどに改造してくれています。改造前に、頭の中で、形をイメージして、その後、部品を選んで、改造にトライ!平面とは違い、3次元でのイメージを作り、形に仕上げています。優れた空間認識力、発想力を、いつも発揮してくれています。次回の改造も、楽しみです。
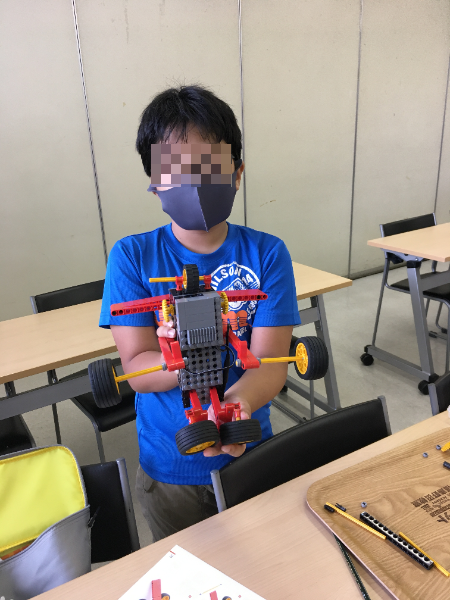
プライマリースタートアップ講座1回目の作例です。テキストに載っているロボット、もしくは自分独自のロボットを作る課題に対して、自分独自の発想で、組み上げてくれました。当日、初めて触った部品ですが、すぐに組み合わせ、接続方法を理解して、戦車をモデルにしたようなロボットを完成!1回目で、この完成度なので、今後の改造で、どんなものを作ってくれるか楽しみです。

お掃除ロボット「ロボクリーン」2回目 の改造例です。 部品を上手く組み合わせ、またギアも入れ込んで、上下するように機構を考えて、改造してくれています。また、何といっても、左右対称のシンメトリーであり、非常にきれいなデザインです。みごとに自分のアルゴリズムを作り上げての改造です。

5月お掃除ロボット「ロボクリーン」2回目 の改造例です。ローラーで取ったゴミが、飛び出さないように、ごみ溜め部にカバーを付けて、また広く、確実にゴミを拾うために、前の左右にロッド9アナでガードを付けています。そのガードが固定されるように、ロッド3アナなどを使って、工夫しています。また、細かいゴミを取るために、ロッド9アナの下に、ビームを付けていましたが、動くと取れてしまったようです。運転席、ハンドル、運転手も付け加えて、リアルなごみ収集車にしてくれました。

5月お掃除ロボット「ロボクリーン」2回目 の改造例です。色々ごみを拾う動作を観察していて、次の点に注目して、改造してくれました。
・ローラーでごみを拾ったときに、ごみ収納部分から、飛び出すので、カバーを付けた
・大きなゴミをローラーが取ろうとすると、ローラーにゴミが巻き付いて、ローラーが止まってしまうので、前の部分に、ある大きさ以上のゴミがローラーまで到達しないように、ガードを付けた
集中した動作観察の結果、改造を成し遂げてくれました。ごみを選別するガードの発想は、素晴らしいです!

ぴょんぴょんうさぎ「ロビット」 1回目の改造例です。今回のロボットの動きを観察して、何の動きに似ているかを考えて、改造してくれました。それは、ルームクランナーでした!後ろ足が動いても、前に進まないように、前足にホイールを外したタイヤを取り付けて、摩擦力を大きくすることを考え出し、機構を作り上げています。この改造により、後ろ足が、ルームランナーの地面を歩いているような動きを作り出しています。見事な発想力です。

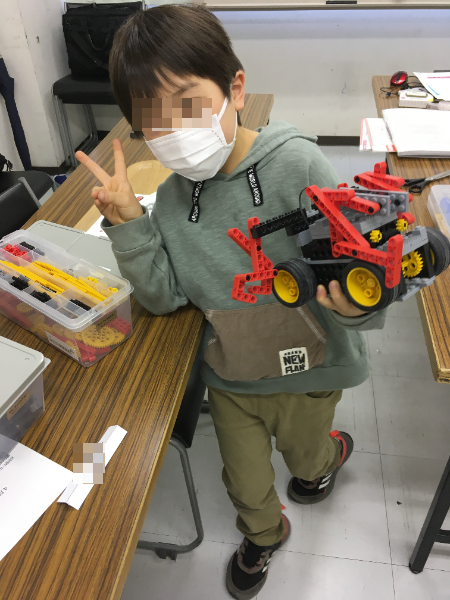
プライマリーコース2回目のロボット改造です。使える部品を、ほぼすべて使って、大改造してくれました。初めて使う部品がほとんどと思いますが、ペグなどを駆使して、部品同士をうまくつなげてくていています。ロボット作りが大好きなことが、伝わってくる作品でした!
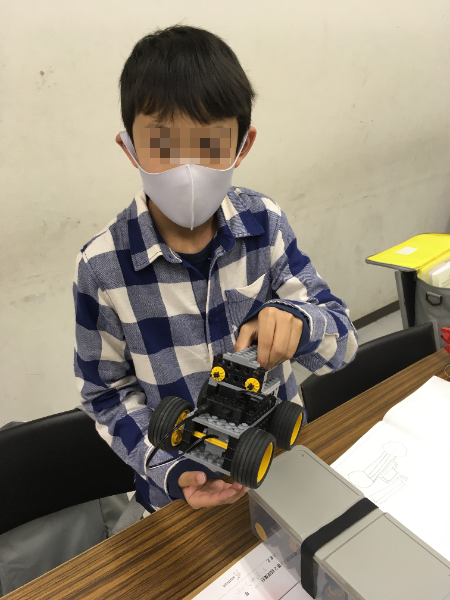
ベーシックコースのスタートアップ講座で、改造をしてくれました。頭の部分を後ろに伸ばして、手で持てるようにしています。ブロックの一部を掴んで、分解せずに持ち上げるのは、難しいのですが、うまくブロックを組み合わせて、持ち上げることができる構造にしてくれています。来月からのロボット製作でも、分解し難いように、改造してみてもらいたいと思っています。
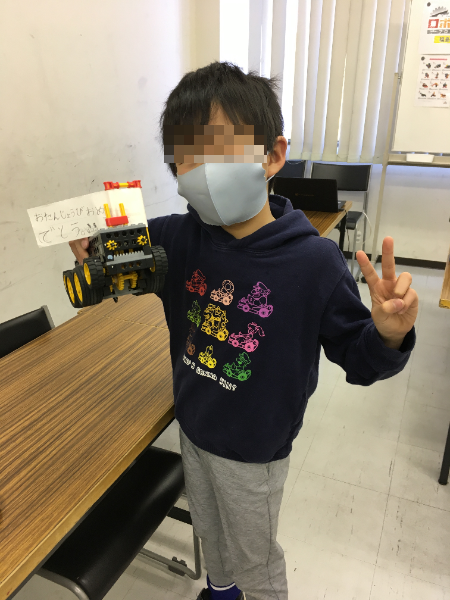
はたらくくるま「ロボドーザー」1回目を作り終えて、改造をしている中で、授業当日が、お父さんの誕生日ということで、メッセージをロボットに着けて、もって帰りたい!となり、紙に、お父さんへのメッセージを書いて、ロボットに取り付けてくれました。何かをしたい、してあげたという気持ちが、物つくりの原点であり、感動した作品でした。
ベーシックコースの生徒さんが、家で、動画を見ながら、 じゃんけん勝負! 「ロボハンド」 を作ってきてくれました!授業開始前に教室に来てくれて、じゃんけんの動作を見せてくれました。動画だけで、作るのは大変だったと思いますが、今月のロボットを作るために、分解しなければならず、少しもったいない気分になりました。また、色々なロボットに挑戦してくれることを期待しています。
