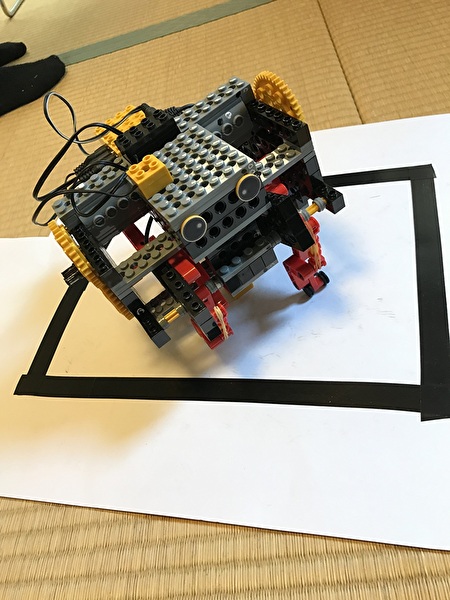
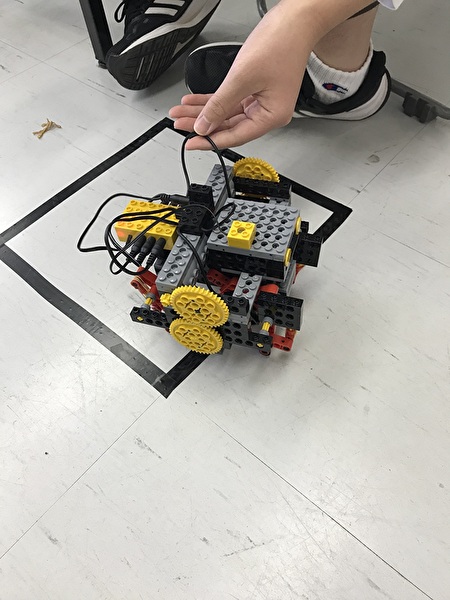
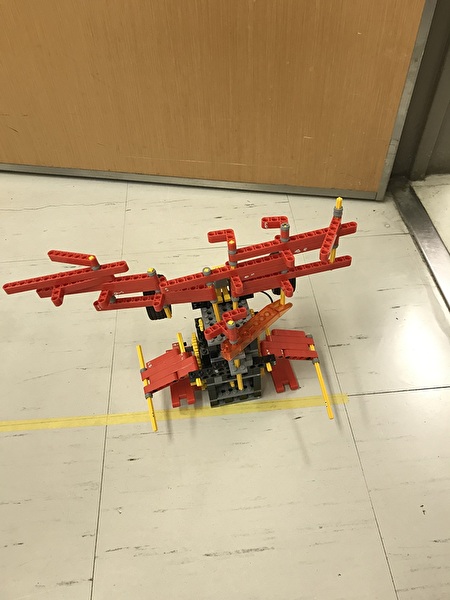
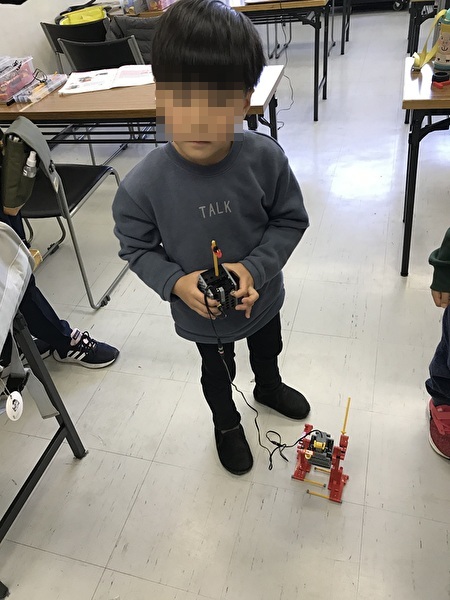
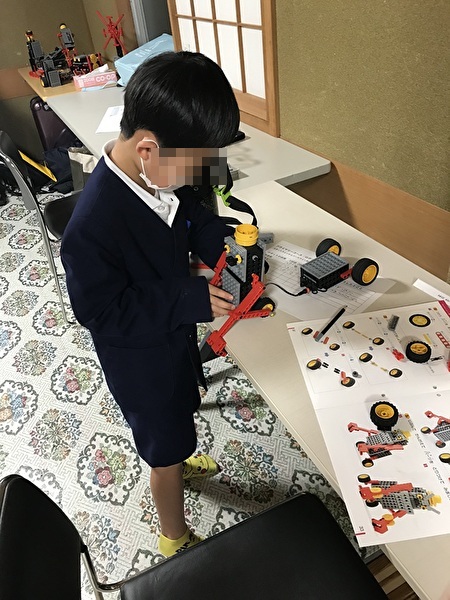
はたらくくるま「ロボドーザー」改造例です。屋根を大きくするために、運転席の後ろに細プレートで支柱を立て、Tロッドを追加して、プレートLを使って、車体全体がおおいかぶさる大きな屋根に仕上げてくれています。その後、1mを何秒で走るかの計測をおこなってくれました。ただ、さらに早いタイムを狙いたいとのことで、タイヤ駆動部に、潤滑剤を塗ってトライしましたが、ほんの少ししか早くならず、満足できなかっいたようで、さらに早くしたい!と考え、電池を元気なものにすれば早くなるとご自身で考えられ、教室の電池を使ってもらい、見事満足いく速さになりました。今までの授業の中で、電池残量で、モーターの回転速度が変わることを体感して、学んでもらっていたのでしょう。また、次回の改造、レースも、楽しみにしています。